
A Vision-Guided Motion Planning for Robotic Object Manipulation
About
This is Mikhail’s Bachelor’s thesis made in the spring of 2025. The thesis received the highest grade of 5.
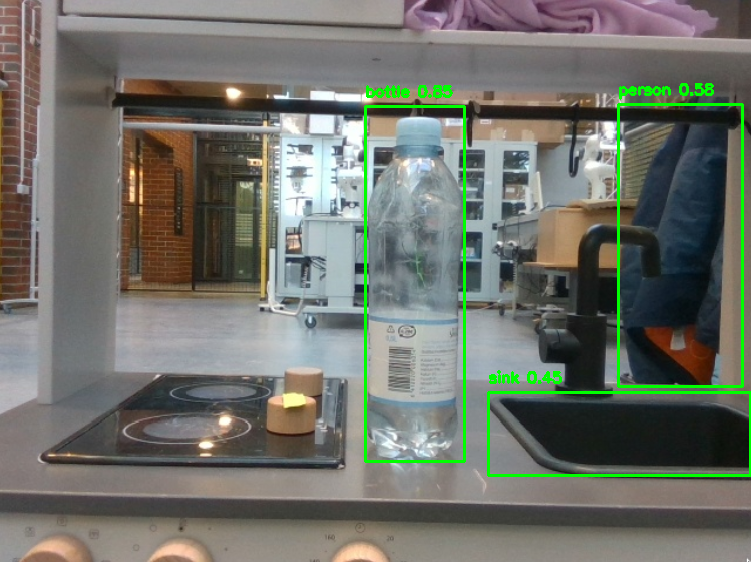
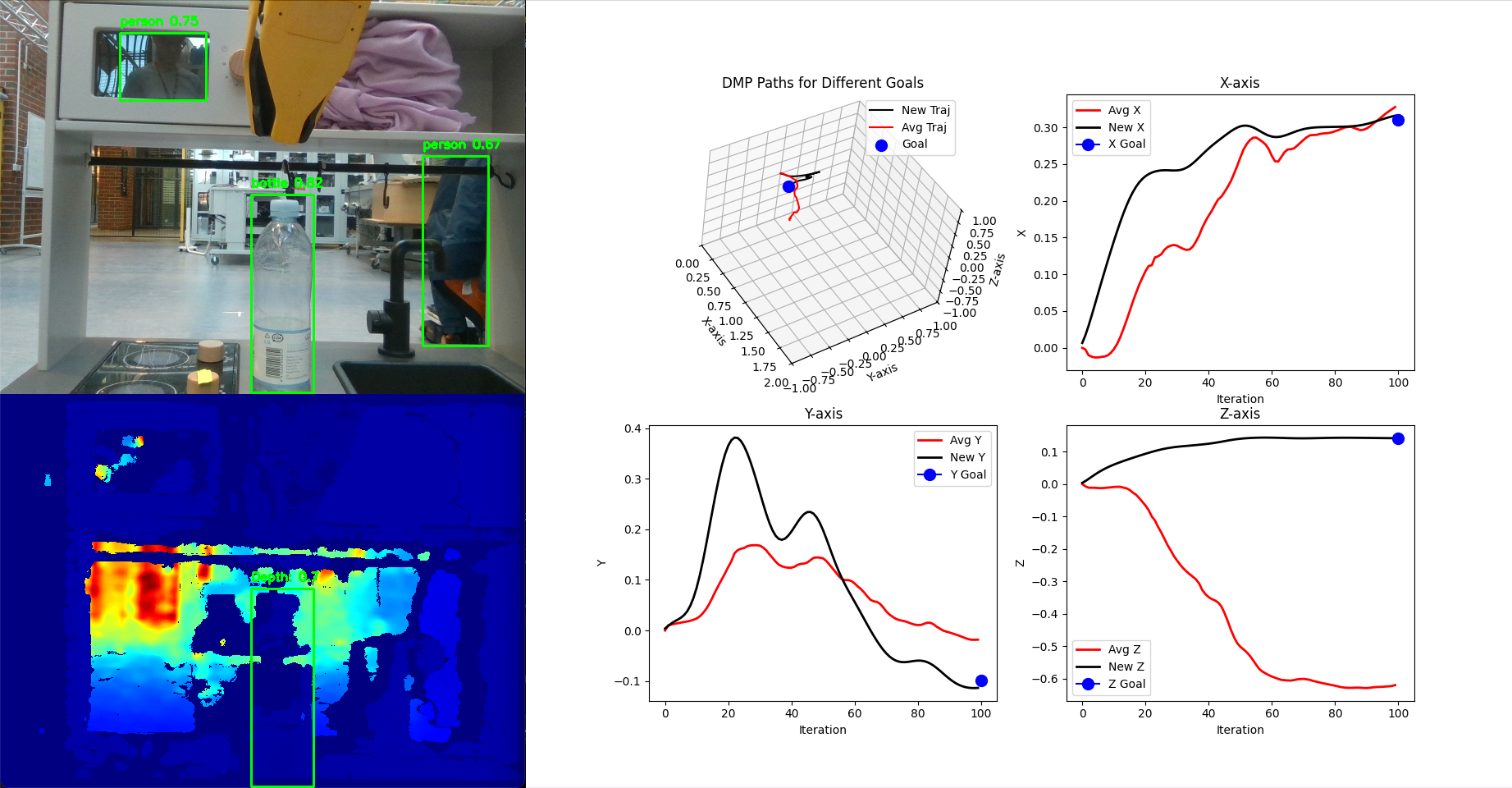
The thesis aimed and achieved to create a system which combines traditional mathematical methods with machine learning to create a system that is able to plan a robot's motion in real time, while being able to adapt to new objects and environments. This system allows the robot to be able to perform the same tasks without needing any training. For example, the thesis utilized only pretrained computer vision models, such as YOLO, as training new models would be against the idea of the thesis. In the end, this ideology results in a system that is fully adaptable without any training and can perform real-time tasks such as picking up objects from the ground.
Each step of the thesis was first researched and tested locally, after which it was implemented on the Boston Dynamics Spot robot. This allowed the thesis to prove developed concepts in real life.